PDF) Fast yet predictable braking manoeuvers for real-time robot control
Por um escritor misterioso
Descrição
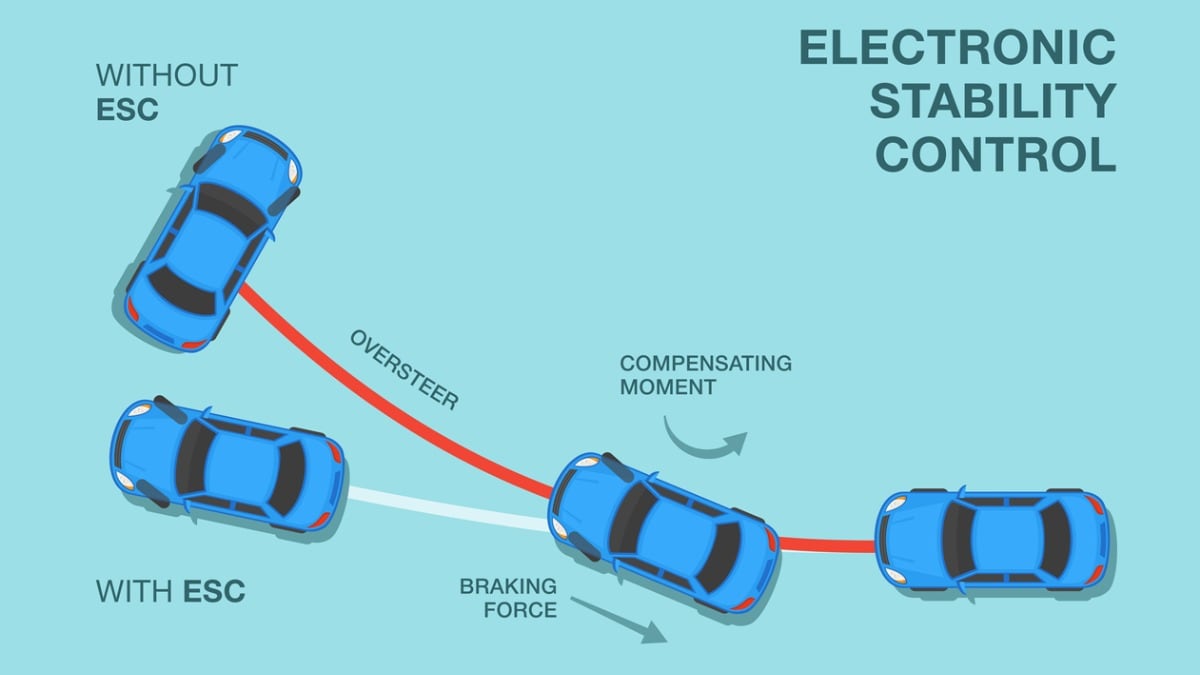
Estimated output from the yaw-rate model of the three maneuvers
Sensors, Free Full-Text
Energies, Free Full-Text

Kinematic profiles: a velocity profile of X axis, b velocity

Integrated guidance and control for microsatellite real-time

Real-time motion planning methods for autonomous on-road driving
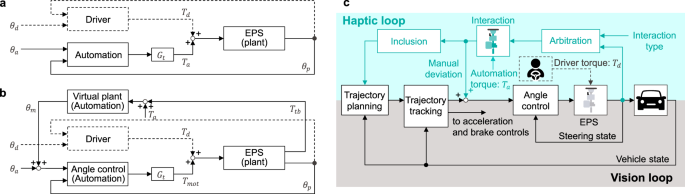
Haptics based multi-level collaborative steering control for
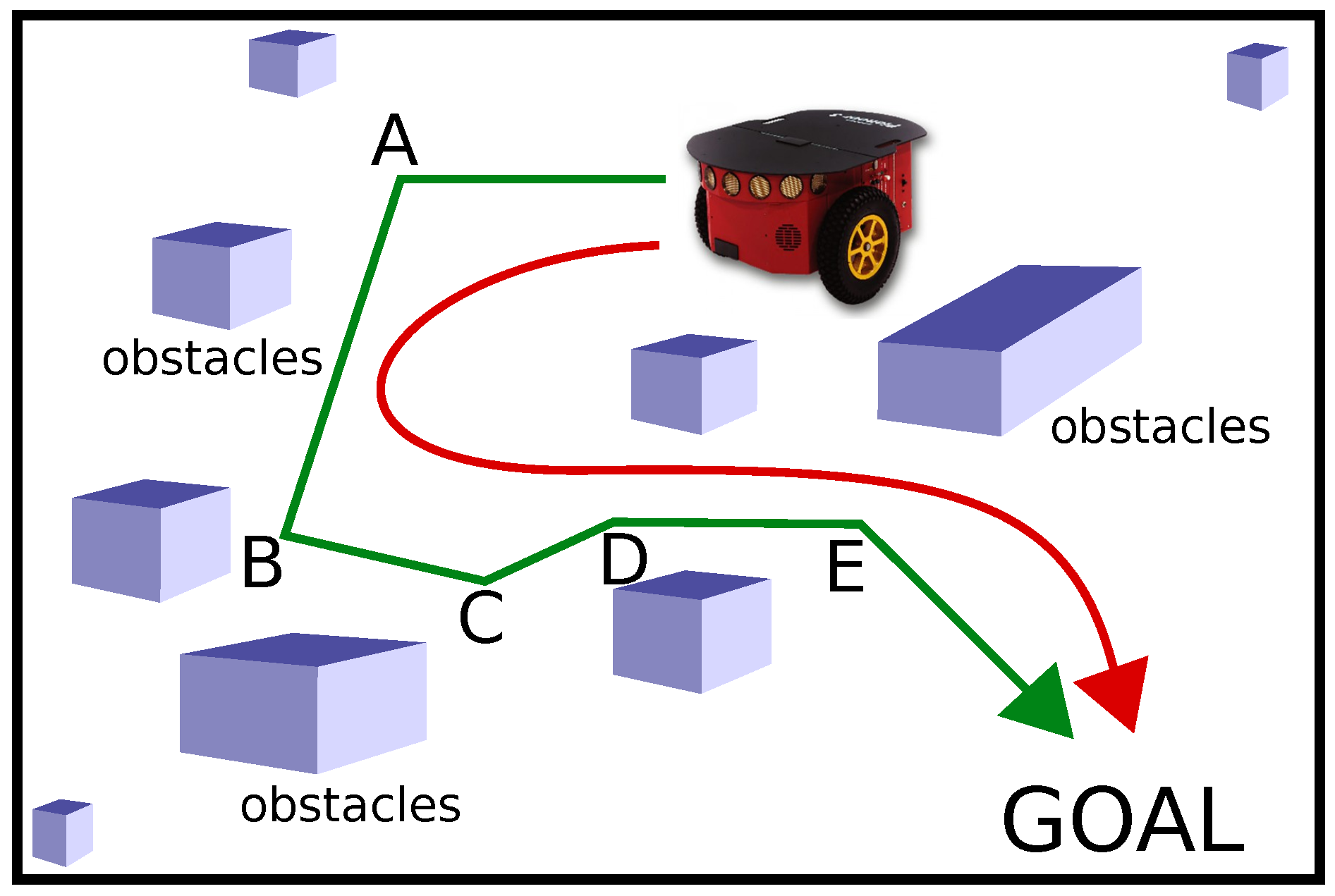
How to Move? Control, Navigation and Path Planning for Mobile

Current and Goal Positions of robot

On infusing reachability-based safety assurance within planning

Empirical description of the Trail-Braking maneuver; from [15